2 Retningslinjer ved installasjon av måleutstyr
2.5 Installasjon
2.5.1 Generelt 2.5.2 Plassering av avstandsgivere 2.5.3 Aksiell posisjon 2.5.4 Frirom 2.5.5 Montering av avstandsgivere 2.5.6 Montering av signalkabler 2.5.7 Montering av overvåkningselektronikk5 Analyse
5.2 Krav til handling
5.2.2 Akselbevegelsens form 5.2.3 Akselens posisjon i lageret 5.2.4 Akselkastets retningHÅNDBOK - AKSELVIBRASJONER
1 Innledning
1.1 Innledning
Håndbok om akselvibrasjoner er utarbeidet som en del av prosjektet Tilstandskontroll av vannkraftverk.
Håndboken dekker akselvibrasjoner i vertikale vannkraftaggregat, og beskriver et system for måling, registrering og analyse av akselvibrasjoner. Den er ment å være en beslutningsstøtte for planlegging av vedlikehold og reparasjon.
Håndboken er basert på erfaringer fra rundt 400 målinger på vannkraftaggregater utført i tidsrommet 1981-1991. Målingene omfatter både feil og normaltilstand.
Det er lagt vekt på at måling og analyse skal kunne utføres av kraftselskapenes eget personell, uten omfattende kjennskap til vibrasjonsanalyse. Måling og analyse kan tilpasses et varierende omfang av instrumentering.
Under arbeidet med håndboken er det forsøkt å legge et grunnlag for enhetlig praksis innen vannkraftbransjen.
Innholdet er delt i fire deler.
- Retningslinjer ved installasjon av måleutstyr
- Angir konkrete krav og praktiske råd til fast installert utstyr
for registrering av avleste verdier.
- Registrering av akselbevegelsens størrelse, form og
posisjon - Beskrivelse av manuelle metoder for
registrering av avleste verdier.
- Analyse - Beskriver hvordan avlesningene skal
tolkes og kriterier for vurderingen av disse.
- Skadeatlas - Beskriver konkrete feil og hvordan disse kan avsløres ved hjelp av systematiske avlesninger og enkle prøver.
Håndboken er spesielt egnet for bruk sammen med vibrasjonsvern som registrerer akselvibrasjoner i alle lagre. Systemet som beskrives er også egnet for bruk i EDB-baserte analysesystemer, både portable og fast installerte.
Akselvibrasjoner er utarbeidet av Nybro-Bjerck as, på oppdrag fra ABB Energi as.
1.2 Gyldighetsområde
Akselvibrasjoner på vertikale vannkraftaggregat med hydrodynamiske glidelagre.
Beskrivelse av måling, registrering og analyse.
1.3 Avgrensing
Prosjektet er begrenset til det som er spesielt ved vannkraftverk.
Prosjektet er begrenset til å gjelde for vertikale vannkraftaggregater.
Med unntak av Skadeatlas omfatter ikke prosjektet måling og analyse med hastighetsgivere eller akselerometre på stasjonære deler (lagerhus, stator, etc).
Prosjektet omfatter ikke programutvikling for registrering og analyse av akselbevegelse.
1.4 Generelt om vibrasjoner
HENTET FRA KURSDOKUMENTASJON
I vannkraftaggregat overføres hydrauliske krefter fra vannet til løpehjulet, magnetiske krefter fra rotor til stator, og mekaniske krefter fra akselsystemet til lagerflatene. Disse kraftoverføringene opptrer som svingninger bestemt av den enkelte maskinens dynamiske egenskaper, som igjen er bestemt av maskinens generelle konstruksjon, fundamentering, opplagring, godstykkelser, materialvalg, turtall osv. Vibrasjonsanalysen er basert nettopp på at maskinens svingebevegelse setter opp og overfører vibrasjonsenergi.
De hydrauliske kreftene på et turbinløpehjul varierer kraftig med pådraget på maskinen. Eksempelvis vil løpehjulet i en fullturbin (Francis eller Kaplan) under tomgang og på last utenom det normale arbeidsområdet være utsatt for mye stokastiske radielle krefter ved innløpet, mens det i det normale driftsområdet er en mer jevn radiell last, gjerne noe ujevnt fordelt rundt omkretsen. Hjulet vil også påvirkes av roterende strøm i sugerøet, og av trykkpulsasjoner både i trykksjakt og i sugerør. For Peltonturbiner og horisontale maskiner vil hydrauliske krefter fra stråle (Pelton) og sugerør (Francis, S-turbin) gi både stasjonære sidekrefter og vekslende belastning med stort antall lastvekslinger.
De hydrauliske kreftene påvirker akselens posisjon og bevegelse både i turbinlager og i generatorlager, og har også innvirkning på vibrasjonene i stasjonære deler.
De magnetiske kreftene i generatoren har også innvirkning på akselbevegelse og -posisjon. Kreftene kan være både skjevtrekk, magnetisk ubalanse og vekslende kraft fra polpassering. Vibrasjoner fra generatoren kjennetegnes ofte med å være mindre lastavhengig enn hydraulisk induserte vibrasjoner.
Mekaniske krefter som påvirker dynamikken i akselstrengen skyldes eksempelvis tyngde av roterende deler (spesielt på horisontale maskiner), treghetskrefter, resonans, lageroppretting, stivhet og retthet i akselstreng. Mekaniske krefter er ofte enten turtalls- eller lastavhengige.
Overføringen av kreftene til lagrene er i stor grad avhengig av lagerets konstruksjon og stivhet. Et turbinlager med faste, lange oppløpskanter vil ha en kraftig sentrerende kraft allerede ved små akselbevegelser, mens et vippeklosselager eller et sylindrisk boret lager ofte krever stor akselbevegelse før de tar opp mye krefter. På grunn av variasjoner som disse er en analyse av vibrasjonene avhengig av riktige antakelser om driftsforhold og den innvirkningen disse har på maskinens oppførsel. Analyse av de kreftene som påvirker akselstrengen er en meget viktig del av tilstandskontroll i vannkraftverk.
2 Retningslinjer ved installasjon av måleutstyr
2.1 Generelt
2.1.1 Gyldighetsområde
Retningslinjene gjelder for roterende vannkraftaggregater.
Retningslinjene angir teknisk/praktiske anbefalinger og krav for installasjon av berøringsfrie avstandsgivere til måling, overvåkning og analyse av akselbevegelse i vannkraftaggregater. Utstyr for måling og overvåking (vern) er beskrevet. Analyseutstyr er ikke beskrevet i disse retningslinjene.
Generelt gjelder at utstyrsleverandørenes anvisninger skal følges.
Ved utarbeidelse av retningslinjene er det tatt hensyn til vannkraftaggregaters spesielle konstruksjon med store masser og lave turtall.
Bruk av berøringsfrie avstandsgivere benyttes der lagrene er hydrodynamisk oljesmurte glidelagre eller vannsmurte glidelagre av gummi eller plast. Retningslinjene dekker ikke måling på aggregat med kule- eller rullelagre.
Måling med hastighetsgivere eller akselerometre på stasjonære deler (lagerhus, stator etc) inngår ofte i analyse av vibrasjoner i et aggregat. Slike målinger er ikke omhandlet i disse retningslinjene.
Retningslinjene er ikke utformet for bruk som leveringsbetingelser overfor utstyrsleverandører.
2.2 Måleobjekt
2.2.1 Måleflate
Krav til måleflate:
Se Tabell 1.
Tabell 1: Krav til måleflate Måleflate Aksel eller bærehode. Formfeil Mindre enn 25 μm totalt i måleflaten. Minste tykkelse 10 mm (ved måling mot kraver etc)
Materialet skal være ferittisk stål eller støpejern. Andre materialer kan godtas hvis avstandsgiver/oscillator er godkjent for dette. Ref. Kapittel 3.1. De elektriske og magnetiske egenskapene skal ikke variere i måleflaten.
Måleflaten skal ha en maksimal urundhet på 5 μm definert som avvik fra en konsentrisk sirkel om akselsenter. Dette tilsvarer et totalt avlest kast på 10 μm. I tillegg kreves at overflateruheten skal være mindre enn 1,6 Ra μm. Måleflaten må være maskinert og fri for sår og riper. Aksiell deling tillates ikke.
Måleflaten må ikke påvirkes av magnetfelt fra strømførende skinner/kabler eller andre elementer som stråler ut elektromagnetisk støy.
Eventuell reparasjons- eller påleggssveising må ha samme egenskaper som grunnmaterialet. Er man i tvil om dette må nærmere undersøkelser utføres.
Bruk av påleggsveiste eller på andre måter metallbelagte soner som måleflate bør unngås. Hvor dette ikke er praktisk mulig, bør avstandsgiverne kalibreres mot den ferdige aksel.
Referansegiver skal føle mot en fordypning eller en utstikkende del på rotor.
2.3 Måleutstyr
2.3.1 Avstandsgiverkrets
Avstandsgiver sammen med oscillator og eventuell kabel mellom disse danner avstandsgiverkrets som skal gi et spennings- eller strømsignal som varierer lineært med avstand til måleflate.
Krav til sensorer:
Se Tabell 2.
Tabell 2: Krav til sensorer Lineært område 50 % større enn lagerklaring, minimum 1,5 mm. Følsomhet Konstant (normalt 8 mV/μm for stål) i hele det lineære måleområdet. Nøyaktighet ± 5 % av oppgitt følsomhet i hele det lineære området ved 20 °C og 10 Hz. Frekvensområde ± 5 % av oppgitt følsomhet i området 0 Temperaturområde ± 10 % av oppgitt følsomhet i området 0 - 100 °C. Langtidsstabilitet Drift i Gap-måling ± 50 μm pr 10 år. Støy Kretsen skal ha evne til å undertrykke støy. Dette oppnås ved å benytte en høy følsomhet, normalt benyttes 8 mV/μm.
Givere som skal monteres neddykket i vann eller olje, må være av en type som er godkjent for dette.
Givere kan ha oscillatorkrets innebygd eller som en egen enhet. Giverne må ha en festemetode som sikrer stabil innfesting og gir en enkel montering og avstandsinnstilling.
For fast installerte givere hvor langtidsstabilitet ikke kan påregnes kan dobbelt sett givere monteres. Giverne monteres to og to 180° mot hverandre på hver side av akselen. Dette gjør det mulig å beregne drift i Gap-måling.
Måling mot annet materiale enn det materialet avstandsgiverne er garantert for kan gi vesentlige endringer i følsomhet, måling mot påleggssveiste materialer kan gi målefeil (ref. Kapittel 2.1).
Nedenfor er gitt en oversikt over avstandsgivere som pr 1991 tilfredsstiller kravene gitt ovenfor, og som er egnet for bruk på vannkraftaggregat.
| Fabrikat | Type | Oscillator | Følsomhet | Gjenge |
|---|---|---|---|---|
| Schenck: | SD-052 IN-081 | OD-051 Integrert | 8 mV/μm 8 mV/μm | M10 x 1 M10 x 1 |
| Vibro-Meter | VIBRAX TQ 102 | IQS 603 | 8 mV/μm | M10 x 1 |
| Bently-Nevada | System 3300 330104- | 330100- | 8 mV/μm | M10 x 1 |
| Bently-Nevada | System 7200 22810- | 18745- | 8 mV/μm | M10 x 1 |
2.3.2 Referansegiver
Krav til referansegiver:
- Giveren skal gi et signal når referansepunktet på akselen passerer. Dette signalet skal ha et nivå som entydig skiller det fra grunnivået.
Referansegiver kan være av optisk eller induktiv type. Induktiv bryter anbefales. En vanlig avstandsgiver kan også benyttes, men her vil det for enkelte typer analyseutstyr være vanskelig å skille akselkast fra referansesignal.
2.4 Overvåkingsutstyr
2.4.1 Vibrasjonsvern, fast installert overvåkning
Krav til overvåkingsutstyr inklusive avstandsgivere:
- Se Tabell 4.
| Lineært område | Større enn lagerklaring. |
| Følsomhet | Konstant (normalt 8 mV/μm for stål) i hele det lineære måleområdet. |
| Nøyaktighet | ± 5 % av oppgitt følsomhet i hele det lineære området ved 20 °C og 10 Hz. |
| Frekvensområde | ± 5 % av oppgitt følsomhet i området 1 - 500 Hz (-3 dB). |
| Temperaturområde | ± 10 % av oppgitt følsomhet i området: 0 - 60 °C for avstandsgivere 0 - 50 °C for oscillatorer og overvåkingselektronikk |
| Langtidsstabilitet: | Drift i Gap-måling ± 50 μm pr 10 år - Kontinuerlig overvåking av akselbevegelse. - Mulighet for avlesing av Gap. - Mulighet for avlesing av akselbevegelse. - 1 alarmrelé for hvert målested, selvholdende, arbeidsstrøm. - Alarmgrense innstillbar i hele måleområdet. - Tidsforsinkelse på alarm, justerbar 0 - 10 sek. - Feil ved overvåkingsutstyret må ikke kunne utløse alarm for høyt vibrasjonsnivå. |
Anbefalt utstyr:
Sensorer
- Sensor følsomhet 8 mV/μm.
Overvåkingselektronikk
- Kontinuerlig overvåking av akselbevegelse Smax iht VDI 2059.
- Kontinuerlig angivelse av akselbevegelse, digitalt eller analogt.
- Mulighet for avlesing av Gap.
- Mulighet for avlesing av akselbevegelse for hver enkelt sensor.
- Mulighet for avlesing av alarmgrenser.
- 2 alarmreleer pr målekanal, for høyt og kritisk høyt nivå. Arbeidsstrøm, selvholdende.
- Alarmgrenser innstillbare i hele måleområdet.
- Tidsforsinkelse for 1. alarmrelé 30 sek.
- Tidsforsinkelse for 2. alarmrelé 3 sek.
- Mulighet for midlertidig heving av alarmgrenser med en faktor 1,3.
- Førstealarmsanvisning.
- Analog utgang for fjernavlesing av målesignal.
- Mulighet for uttak av råsignal fra BNC-kontakter i frontpanel.
- Kretskontroll med alarm for kretsfeil.
- Strømforsyning 230 VAC, felles for sensorer og elektronikk, og med felles strømbryter.
- Montering i 19” rack i lett lesbar høyde i kontrollrom.
- Angivelse av sensorplassering på frontpanel.
Følgende vibrasjonsvern kan leveres i henhold til nødvendige krav, og kan dekke de viktigste anbefalte funksjonene gitt ovenfor. Systemene anses velegnet for overvåking av vannkraftaggregat.
- Schenck Vibrocontrol 2000
- Vibrometer, digitalt system
- Bently-Nevada system 3300
2.4.2 Signalkabler
Krav til skjerming:
- Se Tabell 5.
Tabell 6 gir oversikt over andre spesifikasjoner for signalkabler.
| Skjerm | Flettet skjerm |
| Område | Anbefaling |
|---|---|
| Anbefalt kabel mellom oscillatorer og overvåkingselektronikk | - 4 · 0,5 mm2 tverrsnitt - flettet kobberskjerm |
| Utvendig beskyttelse | Oljebestandig. PVC eller tilsvarende |
| Mekanisk beskyttelse | Kabler fra sensor til oscillator og fra oscillator til koblingsboks bør være beskyttet av stålarmert slange. |
| Maks driftstemperatur | 60 °C |
| Terminering av skjerm | se Kapittel 5.6 |
| Lagerisolasjon | se Kapittel 5.5 |
| Eksempel på anbefalt kabel | ABB, Norsk Kabel - RCOP 60V |
2.5 Installasjon
2.5.1 Generelt
Kravene og anbefalingene gitt nedenfor gjelder for fast installasjon av avstandsgivere og elektronikk på nye aggregater. Det er lagt vekt på at slike installasjoner skal gis en enhetlig utforming innen vannkraftbransjen.
Ved installering på eksisterende aggregater vil det av praktiske grunner ofte være nødvendig å fravike disse krav og anbefalinger. I slike tilfeller må det legges vekt på og kontrolleres at den totale målenøyaktighet ikke fravikes.

2.5.2 Plassering av avstandsgivere
Krav til plassering:
Avstandsgiverne plasseres to ved hvert styrelager, 90° på hverandre. I tillegg plasseres en fasereferanse ved ett av lagrene.
Avstandsgiverne orienteres etter retningen på innløpet til turbinen. To givere ved samme lager betegnes X og Y. X-giver plasseres medurs fra Y-giver sett ovenfra, i en avstand 90° ± 5°. Se Figur 3.2.
Alle Y-givere plasseres på en aksiell rett linje (rett ovenfor hverandre). Det samme gjelder X-givere. Maksimalt avvik fra en aksiell linje ± 10°.
Referansegiver plasseres på samme aksielle linje som Y-giverne.
2.5.3 Aksiell posisjon
Krav til aksiell posisjon:
Aksiell avstand mellom avstandsgiver og avtrapninger, A1, minst i følge leverandørens minstekrav.
Aksiell klaring mellom roterende deler og avstandsgivere, A2, minst ifølge leverandørens minstekrav.
I tillegg kommer nødvendig aksiell klaring, A3 for aksialbevegelse innenfor aksiallagret, for løft av rotor før start og eventuell løft ved stopp av Kaplanaggregater.
Aksiell avstand fra lagergang skal normalt ikke være mer enn en meter. Giverne bør normalt plasseres utenfor lagerhus.
For en standard avstandsgiver med M10 x 1 utvendig gjenge bør:
A1 = minimum 6 mm
A2 = minimum 10 mm
A3 = minimum 10 mm (gjelder vertikale aggregater)
2.5.4 Frirom
Krav til frirom
Alt metall i nærheten av spissen på avstandsgiveren kan påvirke målingen. For å unngå feil skal der rundt spissen av avstandsgiver være et område fritt for metall. Størrelsen på dette frirommet skal minst være som anbefalt av leverandør.
Ved plassering av referansegiver og avstandsgiver på samme brakett må minste avstand mellom sensorene være 55 mm.
En standard avstandsgiver med M10 x 1 utvendig gjenge bør ha et frirom som angitt i Figur 4. Det er ikke krav til at tuppen på avstandsgiver skal stikke utenfor metallflaten.
2.5.5 Montering av avstandsgivere
Avstandsgiverne festes på en måte som sikrer en stabil og permanent avstand til måleflaten. Giverne plasseres på steder der de ikke kommer i veien for normalt vedlikeholdsarbeid.
Krav til montasje
Festebraketter og de deler disse festes i må være tilstrekkelig stive, med bevegelse som er liten i forhold til akselbevegelsen som måles, og maksimum 25 μm.
Avstandsgivere, braketter og kabel må om nødvendig isoleres slik at lagerstrømsisolasjon ikke brytes. Krypstrømvei min. 25 mm, dobbelt isolasjon.
Sensorer festes normalt til lagerdeksel på styrelagre. Festeflater må være stive slik at vibrasjoner i stasjonære deler ikke påvirker måling av akselkast i vesentlig grad. Bevegelsen i festepunkt skal være liten i forhold til akselbevegelsen som måles, og maksimum 25 μm 0-peak.
Givere som plasseres slik at de er utsatt for mekanisk skade, for eksempel kan bli tråkket på, gis en solid avskjerming mot dette. En slik skjerm må kunne fjernes uten å forstyrre avstandsgiverens justering i forhold til måleflaten.
Giverne skal festes slik at avstanden til måleflaten enkelt kan justeres. Etter justering låses denne på en sikker måte. Festebraketter bør fortrinnsvis være boltet fast slik at disse kan fjernes helt ved demontering og vedlikeholdsarbeid.
2.5.6 Montering av signalkabler
Kabel legges slik at fare for signalstøy blir minst mulig. Nærføring av skinner/kabler som fører høye strømmer må unngås. Dette gjelder også for kabler som fører spenning høyere enn 230 V DC/AC.
Alt etter det aktuelle tilfelle må egnet skjerming og kabelføring velges. For eksempel kan signalkabel legges i rør ved felles gjennomføring i vegg.
Signalkabelens skjerm jordes kun i en ende, ved overvåkingselektronikken.
Isolering mot lagerstrøm, se Kapittel 5.5
2.5.7 Montering av overvåkningselektronikk
Overvåkingselektronikk anbefales plassert i kontrollromspanel, lett tilgjengelig for avlesning av måleverdier og for tilkobling av analyseutstyr i fronten. På frontpanel angis retning og plassering for sensorene, slik at avleste verdier er lett forståelige.
Utstyret kan med fordel plasseres i 19” rack, med ekstern bryter for strømforsyning.
Det anbefales separate systemer for hvert aggregat.
Enheten skal plasseres best mulig skjermet mot støy.
2.6 Kontroll
Ved installasjon foretas kalibrering og funksjonstesting av hver målekrets.
Det skal kontrolleres at sensor/brakett/kabel ikke kortslutter lagerisolasjon.
Utstyr som har vært demontert, må justeres inn på ny.
Etter revisjon, reparasjonsarbeider, demontasje e.l. må nye innstillinger av alarmgrenser foretas.
Ny kalibrering foretas hvert 10 år.
3 Vibrasjonsmåling i tilstandskontroll
3.1 Innledning
HENTET FRA KURSDOKUMENTASJON
Vibrasjonsmåling på vannkraftaggregat brukes ved feilsøking og i vedlikeholdsplanlegging. Målingene gir en objektiv og tallfestet beskrivelse av tilstandsparametre, og kontroll av komponenter som ikke ellers kan kontrolleres uten vesentlig demontasje og driftsstans. Det gir mulighet til å undersøke aggregatets oppførsel under drift, med trykk- og spenningspåkjente konstruksjoner.
Det er et mål å forenkle tilstandskontrollsystemene og prosedyrene knyttet til bruken av dem uten at det går utover kvaliteten på tilstandsvurderingene. Dette oppnås ved en rimelig fordeling mellom fast installert overvåkingsutstyr og rutinemessig måling og analyse. De forskjellige alternativene som foreligger for vibrasjonsovervåking av vannkraftaggregat er:
- Referansemålinger (fingeravtrykk)
- Periodiske målinger
- Kontinuerlig overvåking
- Feilsøking
Referansemåling bør foretas mens aggregatet er i antatt god stand, og tjener som et fingeravtrykk ved senere analyser, både generell tilstandskontroll og feilsøking. Den gjør det lettere å skille ut de karakteristiske systemvibrasjonene til en maskin fra vibrasjoner som skyldes endringer eller feil, og gjør feilsøking lettere. En referansemåling bør følges opp med enklere periodiske målinger, f.eks. 1 gang pr år, og på nye aggregat tidsnok til at eventuell utvikling i garantiperioden kan oppdages. Ved en referansemåling tas oftest måling både av akselbevegelse og av vibrasjoner i stasjonære deler.
Periodiske målinger med analyser er den overvåkingen som gir mest og sikrest informasjon om aggregatets tilstand, og disse inngår også som en naturlig del av tilstandsbasert vedlikeholdsplanlegging. Periodiske målinger bør omfatte både måling av akselens bevegelse i lageret og av vibrasjoner i stasjonære deler. Målingene sammenliknes med referansemåling og tidligere målinger, og uten omfattende analyse fremgår utvikling over tid av vibrasjoner og svingebildet i en maskin.
Enkle målinger kan foretas med PC-baserte målesystemer av kraftverkets eget personell, uten spesiell kjennskap til vibrasjonsanalyse. Det finnes flere slike for måling på stasjonære deler. Det er også utviklet et PC-basert system, “HYDMON-IMPULS” , for måling av akselvibrasjoner. Systemet gir en lett forståelig presentasjon av akselens bevegelse og posisjon, og benyttes for å kartlegge kreftene som virker på akselstrengen. Systemet er godt egnet til bruk av kraftverkets eget personell sammen med avstandsgiverbaserte vibrasjonsvern, og gir en økt nytte av vernet uten store instrumenteringskostnader.
Mange feil utvikles over lang tid, og periodiske målinger kan derfor i noen grad erstatte kontinuerlig overvåking. For periodiske målinger kombinert med kontinuerlig overvåking, har vern basert på avstandsgivere ved hvert lager vært meget brukt.
Kontinuerlig overvåking baseres oftest på måling og angivelse av akselens bevegelse i lagrene. Prinsippet for overvåkingen er vist Figur 9. Slike system er installert i rundt 60 norske aggregat, og har vist seg å være pålitelige og sikre. Akselkast er dessuten en lett forståelig presentasjon av maskinens oppførsel, noe som gjør diagnosestilling enkel for driftspersonalet. Systemet legges opp med alarm- og nødstoppfunksjoner, og vil i tillegg til å varsle om feil eller begynnende skadeutvikling også verifisere at maskinens tilstand er god.
Det er viktig at vernet legges inn i styringen av aggregatet på en slik måte at vibrasjoner under start og stopp eller frakobling og lastendringer ikke gir alarminnstillinger som fører til dårligere overvåking under stasjonær drift.
I tillegg til overvåking av akselens bevegelse, gir slike vern også mulighet for å holde oppsikt med akselens posisjon i lageret med tanke på f.eks. setninger i fundamenter. Det finnes vibrasjonsvern med kontinuerlig angivelse av lageroppretting, utviklet spesielt for slik bruk. For registrering av setninger vises forøvrig til rapporten “Overvåking av setninger i kraftverk” utgitt av Vassdragsregulantenes Forening 1992.
Ofte kompletteres avstandsgiverbaserte vern med akselerometre eller svingehastighets-givere. Ved bruk av slike sensorer vil et vern fange opp endringer i mer høyfrekvente vibrasjoner enn et rent avstandsgiverbasert vern, samt endringer i aksielle vibrasjoner.
Det finnes mer komplekse overvåkingssystemer enn rene avstandsgiverbaserte vern. Slike mikroprosessorbaserte system er i stand til å overvåke et stort antall parametre og registrere utvikling over tid. Nåværende systemene er kostbare, med store instrumenteringsutgifter for hvert aggregat og komplisert igangsettingsprogram. Det er derfor lite trolig at de vil bli benyttet i stor grad i vannkraftverk med det første.
Anbefalte målerutiner
Valg av system for overvåking vil til en viss grad avhenge av hvilke feil man ønsker å ha best kontroll med. Norconsult anbefaler vanligvis følgende omfang av vibrasjonsovervåking for tilstandskontroll i vannkraftverk:
- Referansemåling
- Avstandsgiverbasert vern
- Periodiske målinger hvert 2-3 år
Vibrasjonsmåling som tilstandskontroll kompletterer de tradisjonelle tilstandskontrollformer som sprekkontroll, funksjonstesting, virkningsgradsmålinger, spaltevannsmåling, korrosjonskontroll etc. Til sammen er disse tilstandskontrollene med på å styre vedlikeholdet stadig mer etter tilstand, og til å unngå unødig driftsstans.
3.2 Prosedyrer for måling
HENTET FRA KURSDOKUMENTASJON
En periodisk måling eller et fingeravtrykk bør omfatte målinger som beskrevet nedenfor. I tillegg kan det være nødvendig med individuelle prosedyrer tilpasset hver maskin. Ved feilsøking er dette ofte nødvendig.
Det benyttes avstandsgivere og akselerometre i et omfang som beskrevet i avsnitt om sensorer. Måling med avstandsgivere utføres samtidig i alle lagre, sammen med fasereferansesignal.
| Stillstand | Måling med avstandsgivere. Akselposisjon måles før og etter hele måleprogrammet. Dette er viktig for å oppdage temperaturvariasjoner (eller sensor-variasjoner) som kan påvirke diagnosen. Ved første måling etter sensor-installasjon kan akselen jekkes fra side til side i styrelagrene for å fastlegge lagersenter. Det er til stor nytte når kreftene i lageret skal anslås. |
| Oppstart | Måling med avstandsgivere. Akselbevegelse og akselposisjon måles ved de første omdreiningene er viktige for analysen. Målingene kan indikere lagerklaring, akselretthet, lageroppretting eller geometrisk uregelmessigheter. |
| Tomgang | Måling med avstandsgivere og akselerometer. Akselvibrasjoner, akselposisjon og vibrasjoner i stasjonære deler måles ved kjøring på nominelt turtall, uten spenningssatt rotor. Endringer i forhold til stillstand gir informasjon om mekaniske feil som ubalanse og dårlig oppretting. |
| Magnetisert | Måling med avstandsgivere og akselerometer. Akselvibrasjoner, akselposisjon og vibrasjoner i stasjonære deler måles ved kjøring med normalt turtall og magnetisert generator. Endringer i forhold til tomgangskjøring gir informasjon om statiske og roterende elektriske krefter. |
| ½ Last | Måling med avstandsgivere og akselerometer. Akselvibrasjoner, akselposisjon og vibrasjoner i stasjonære deler måles. Gir informasjon om lastavhengige krefter og feil. Dette er vanligvis hydrauliske krefter. |
| Fullast | Måling med avstandsgivere og akselerometer. Akselvibrasjoner, akselposisjon og vibrasjoner i stasjonære deler måles. |
| Stopp | Måling med avstandsgivere. Akselvibrasjoner og akselposisjon ved de siste omdreiningene er av størst interesse for analysen. Gir god informasjon om akseloverflatens ujevnheter og akselopprettingen. |
Lastavhengige vibrasjoner kan i tillegg registreres i en større del av driftsområdet. Det kan f.eks. være akselvibrasjon og vibrasjoner i lagerhus, avlest fra vibrasjonsvernet.
Andre dynamiske parametre kan også registreres, f.eks. trykk i tilløp eller servoslag ved avslag. Normalt vil ikke avslagsprøver og ruseprøver være en del av periodiske vibrasjonsmålinger, men kan inngå som del av “fingertrykket”.
Flere driftsparametre kan innvirke på vibrasjonsnivået i maskinen. Disse parametrene bør registreres ved måling. De viktigste er:
- Last
- Temperatur i styrelagre
- Temperatur i stator
- Kjølevannstemperaturer
- Undervannsnivå
- Last på naboaggregater
- Reaktiv effekt
Periodiske målinger bør gjennomføres under like forhold hver gang.
4 Registrering av akselbevegelsens størrelse, form og posisjon
4.1 Skjema
Dette kapitlet omtaler skjema til bruk både ved rutinemessige registrering samt ved analyse av akselbevegelsen, gitt av berøringsløse avstandsgivere.
Skjema 1 til 19 er utformet med tanke på de anlegg som har installert kun vibrasjonsvern, eventuelt bare givere med mulighet for avlesning ved hjelp av portabelt utstyr.
Skjema 20 til 26 viser hvordan måledata kan presenteres i et fremtidig ikt-system for analyse. Ved hjelp av et oscilloskop kan man fremskaffe mange av de samme bildene. Dette omtales spesielt ved de enkelte skjema.
Trendkurvene som er vist på skjema for det manuelle system (skjema nr. 4-6, 11-13, 18, 19) vil være de samme i et ikt-system.
Samtlige skjema er vist i full størrelse i Kapittel 8.
Skjema 1 Avlesningsskjema
Skjema brukes ved rutinemessige avlesninger av vibrasjonsvernet. Tiden mellom avlesingene avgjøres av den enkelte bruker, men bør ikke overstige en måned. Hver avlesning gjøres ved samme last på aggregatet, fortrinnsvis ved fullast eller nær beste driftspunkt.
Skjema 2 Akselbevegelse (Smax) ved varierende turtall
Skjemaet brukes ved tilstandskontroll av aggregatet. Størrelsen på akselkastet noteres etter hvert som turtallet endrer seg, fortrinnsvis ved nedkjøring av aggregatet. Ved nedkjøring er aggregatet ikke påvirket av hydrauliske eller magnetiske krefter.
Noterte verdier plottes i diagrammene for de enkelte lagre etter at målingen er foretatt.
Man bør i tillegg notere seg akselkastet ved sakte rotasjon (saktere enn 10 % av nominelt turtall).
Skjemaet vil vise om det er en sammenheng mellom turtall og akselkast.
Skjema 3 Akselbevegelse (Smax) ved varierende last
Skjemaet brukes ved tilstandskontroll av aggregatet. Størrelsen på akselkastet noteres etter hvert som man øker/minker lasten på aggregatet. Det er viktig å la aggregatet få gå noen minutter på hver enkelt dellast slik at det får stabilisert seg før man noterer kastet.
Skjemaet vil vise om det er en sammenheng mellom last og akselkast.
Skjema 4-6 Trendkurve for akselbevegelse (Smax)
Skjemaet brukes for å følge med i utviklingen av størrelsen på akselkastet over tid.
Det er utarbeidet eget skjema for hvert av lagrene.
Ved hjelp av trendkurvene vil man bestemme når det skal foretas tilstandskontroll.
Skjema 7-8 Akselbevegelse (maxX og maxY) ved varierende turtall
Skjemaet brukes ved tilstandskontroll av aggregatet. Størrelsen på akselbevegelsen i X- og Y-retning noteres etter hvert som turtallet endrer seg, fortrinnsvis ved nedkjøring av aggregatet. Ved nedkjøring er aggregatet ikke påvirket av hydrauliske eller magnetiske krefter.
Noterte verdier plottes i diagrammene for de enkelte lagre etter at målingen er foretatt.
Skjemaet vil vise om det er en sammenheng mellom turtall og akselbevegelsens form.
Skjema 9-10 Akselbevegelse (maxX og maxY) ved varierende last
Skjemaet brukes ved tilstandskontroll av aggregatet. Størrelsen på akselbevegelsen i X- og Y-retning noteres etter hvert som man øker/minker lasten på aggregatet. Det er viktig å la aggregatet få gå noen minutter på hver enkelt dellast slik at det får stabilisert seg før man noterer kastet.
Skjemaet vil vise om det er en sammenheng mellom last og akselbevegelsens form.
Skjema 11-13 Trendkurve for akselbevegelse (maxX og maxY)
Skjemaet brukes for å følge utviklingen til formen på akselbevegelsen over tid.
Det er utarbeidet eget skjema for hvert av lagrene.
Ved hjelp av trendkurvene vil man bestemme når det skal foretas tilstandskontroll.
Skjema 14-15 Akselposisjon (GapX og GapY) ved varierende turtall
Skjemaet brukes ved tilstandskontroll av aggregatet. Posisjonen av akselbevegelsen i X- og Y-retning noteres etter hvert som turtallet endrer seg, fortrinnsvis ved nedkjøring av aggregatet. Ved nedkjøring er aggregatet ikke påvirket av hydrauliske eller magnetiske krefter.
Noterte verdier plottes i diagrammene for de enkelte lagre etter at målingen er foretatt.
Skjemaet vil vise om det er en sammenheng mellom turtall og akselbevegelsens posisjon.
Skjema 16-17 Akselposisjon (GapX og GapY) ved varierende last
Skjemaet brukes ved tilstandskontroll av aggregatet. Posisjonen av akselbevegelsen i X- og Y-retning noteres etter hvert som man øker/minker lasten på aggregatet. Det er viktig å la aggregatet få gå noen minutter på hver enkelt dellast slik at det får stabilisert seg før man noterer posisjonen.
Skjemaet vil vise om det er en sammenheng mellom last og akselbevegelsens posisjon.
Skjema 18-19 Trendkurve for akselposisjon (GapX og GapY)
Skjemaet brukes for å følge med i utviklingen av størrelsen på akselkastet over tid.
Ved hjelp av trendkurvene vil man bestemme når det skal foretas tilstandskontroll.
Skjema 20-22 Akselbevegelse i lager
Den sammensatte akselbevegelsen (orbit) plottet sammen med tidsbilde for hver av sensorene og fasereferansen.
Tilsvarende bilde kan fremskaffes ved hjelp av et oscilloskop. Har man bare et tokanals oscilloskop tar man først frem den sammensatte akselbevegelsen (orbit), og siden tidsbildet av henholdsvis X- og Y-sensor sammen med fasereferansen.
Det vil være samme skjermbilde for hvert av lagrene.
Skjema 23-24 Akselbevegelse i X- og Y-retning
Tidsbildet fra avstandsgiverne i henholdsvis X- og Y-retning ved alle tre lagrene plottes over hverandre sammen med fasereferansen.
Tilsvarende bilde kan fremskaffes ved hjelp at et oscilloskop. Har man bare et tokanals oscilloskop tar man tidsbildet av henholdsvis X- og Y-sensor ved hvert av lagrene sammen med fasereferansen.
En annen måte er å la et av lagrene, for eksempel øvre generatorlager, være fast og kjøre de to andre lagrene opp mot dette. Når tidsbildet fra to lagre legges opp på hverandre vil det være lett å se om de er i fase eller ikke.
Skjema 25 Akselposisjon i tre lagre sammenstillt
Endringen av akselposisjonen i lagrene avhengig av driftssituasjonen er satt opp i skjermbildet. Her har man valgt å la tomgang være utgangsposisjonen (0-stilling). Stillstand eller magnetisert generator vil være andre naturlige utgangsposisjoner som kan brukes.
Ved hjelp av et oscilloskop kan man få frem tilsvarende opplysninger. Man ser på et lager om gangen og benytter DC-signalet til analysen. Man noterer stillingen til akselbevegelsen ved en driftsituasjon, før man kjører til neste og gjør det samme der. Ved å sammenlikne disse to bildene finner man ut om akselbevegelsens posisjon endrer seg, og eventuelt i hvilken retning.
Skjema 26 Akselretthet og fasevinkel
Skjermbildet viser akselbevegelsen i alle tre lagre plassert over hverandre. Pilene indikerer fasevinkel for hvert enkelt lager. De fire diagrammene på høyre side viser akselstrengen i fire forskjellige posisjoner (0°, 90°, 180° og 270°). Tilsvarer opprettingsskjema som brukes av leverandørene ved opprettingskontroll.
4.2 Bruk av oscilloskop
Ved de fleste vibrasjonsvern er det uttak for analyseutstyr i fronten på overvåkningsmodulene. Vern fra Bently Nevada og Vibro-Meter har uttak beregnet for BNC-plugger, ytterligere jording ikke nødvendig. Schenck har uttak beregnet for “banan-stikker”, der hvert enkelt uttak må jordes spesielt (eget jordingsuttak på sentralmodulen).
Det forutsettes at man benytter et oscilloskop med minimum to kanaler.
Kontroll av fase
Alt. 1: Signal fra referansegiver kjøres inn på kanal 1. Signal fra sensorene plassert i X-retning kjøres en og en inn på kanal 2. Man noterer seg avstanden fra største utsving til referansepunktet ved hvert av lagrene, og sammenlikner.
Alt. 2: Signal fra et av lagrene i X-retning kjøres inn på kanal 1. Signal fra sensorene plassert i X-retning ved de andre lagrene kjøres en og en inn på kanal 2. Er akselkastet i fase ved de to lagrene som sammenliknes, skal de ha maks utslag på samme sted.
Kontroll av form
Signal fra sensorene plassert i X- og Y- retning ved samme lager kjøres inn på hver sin kanal. Man må påse at man bruker samme forsterkning på begge kanalene, slik at ikke akselkastets form fordreies.
5 Analyse
Dette kapitlet beskriver utførelsen av tilstandskontroll ved måling av akselbevegelsen i et vertikalt vannkraftaggregat.
Der første avsnittet beskriver referansemåling og registrering av normalverdier. En kjent normaltilstand er utgangspunktet for vurdering av tilstanden til et aggregat.
Det andre avsnittet beskriver de handlinger som bør iverksettes ved endring av akselbevegelsen. Tiltakene er gradert fra “Ingen handling” til “Øyeblikkelig stopp”.
Det tredje avsnittet beskriver hvordan man skal bestemme hvilken feil/skade aggregatet har fått. Ut fra endring av akselbevegelsen leter man seg frem i diagrammene ved å svare på enkle spørsmål, inntil man kommer frem til en aktuell feil/skade.
Det fjerde avsnittet beskriver setting av grenseverdier for alarm og stopp i et vibrasjonsvern basert på berøringsløse avstandsgivere.
5.1 Normaltilstand
Dette avsnittet viser akselbevegelsens form, posisjon og størrelse når tilstanden til aggregatet er god (normaltilstand).
Måledata for de aktuelle kurver og diagrammer som er vist bør innhentes når aggregatet er nytt, revidert eller generelt har en god tilstand.
Når man foretar en analyse av vibrasjonene i et aggregat, utfører man de prøver som er beskrevet under Registrering av akselbevegelsens størrelse, form og posisjon. Det vil vise hvordan akselbevegelsen påvirkes av turtallsendringer, lastendringer, etc. Prøvene må utføres under de samme forhold som når normaltilstanden, referansemålingen, ble registrert. Er forholdene nær de samme, vil man få et godt grunnlag for å vurdere tilstanden til aggregatet.
Akselbevegelsen kan være avhengig av andre parametere som undervannsnivå og lagertemperaturer. Slike parametere skal noteres når man foretar en måling.
Normaltilstanden til aggregatet bør oppjusteres etter hver større revisjon av aggregatet. Det vil si at en ny referansemåling bør tas. Skjemaene som viser normaltilstanden kommer på de neste sidene. Vedrørende skjemaene vises til Registrering av akselbevegelsens størrelse, form og posisjon.
5.1.1 Øvre generatorlager
Jeg antar at det ikke er nødvendig med skisser av måleskjemaene her, men at linker til full størrelses skjemaer er tilstrekkelig??
Lagerklaring: μm
Lim 1: μm
Lim 2: μm
Umagnetisert
Magnetisert
1/2 Last
1/1 Last
Akselbevegelse (Smax) ved varierende turtall
Akselbevegelse (Smax) ved varierende last
Akselbevegelse (maxX) ved varierende turtall
Akselbevegelse (maxX) ved varierende last
Akselbevegelse (maxY) ved varierende turtall
Akselbevegelse (maxY) ved varierende last
Akselposisjon (GapX) ved varierende turtall
Akselposisjon (GapX) ved varierende last
Akselposisjon (GapY) ved varierende turtall
Akselposisjon (GapY) ved varierende last
5.1.2 Nedre generatorlager
Lagerklaring: μm
Lim 1: μm
Lim 2: μm
Umagnetisert
Magnetisert
1/2 Last
1/1 Last
Akselbevegelse (Smax) ved varierende turtall
Akselbevegelse (Smax) ved varierende last
Akselbevegelse (maxX) ved varierende turtall
Akselbevegelse (maxX) ved varierende last
Akselbevegelse (maxY) ved varierende turtall
Akselbevegelse (maxY) ved varierende last
Akselposisjon (GapX) ved varierende turtall
Akselposisjon (GapX) ved varierende last
Akselposisjon (GapY) ved varierende turtall
Akselposisjon (GapY) ved varierende last
5.1.3 Turbinlager
Lagerklaring: μm
Lim 1: μm
Lim 2: μm
Umagnetisert
Magnetisert
1/2 Last
1/1 Last
Akselbevegelse (Smax) ved varierende turtall
Akselbevegelse (Smax) ved varierende last
Akselbevegelse (maxX) ved varierende turtall
Akselbevegelse (maxX) ved varierende last
Akselbevegelse (maxY) ved varierende turtall
Akselbevegelse (maxY) ved varierende last
Akselposisjon (GapX) ved varierende turtall
Akselposisjon (GapX) ved varierende last
Akselposisjon (GapY) ved varierende turtall
Akselposisjon (GapY) ved varierende last
5.2 Krav til handling
Ved hjelp av trendkurvene ser man eventuelle endringer i vibrasjonsbildet. Avhengig av størrelsen på endringene vil det settes forskjellige krav til handling av operatøren. På de neste sidene er kravene satt opp i tabell.
Kravene til handling er delt opp i tre kategorier:
Ingen handling
- Det er bare mindre endringer i tilstanden til aggregatet. Endringene er ikke større enn at de må betraktes som naturlige variasjoner.
Foreta kontroll
Søk å finne hvilken eventuell feil/skade som er under utvikling ved å se på feilsøkingsskjema.
Når type feil/skade er bestemt, les om det aktuelle tilfellet i Skadeatlas, og utfør de kontroller/supplerende målinger som er beskrevet.
Foreta ny måling av akselbevegelsen etter en uke for å kunne vurdere utviklingshastigheten til den eventuelle feil/skade.
Øyeblikkelig stans
- Skaden har allerede utviklet seg så langt at det er fare for skade på maskineriet om man forsetter videre drift.
5.2.1 Akselbevegelsens størrelse 1)
| Størrelse på akselkast relatert til radiell lagerklaring 2) | < 60 % | 60 - 80 % | < 80 % | |
| Endring av størrelse på akselkast 3) | > 25 % | Ingen handling | Foreta kontroll | Øyeblikkelig stans |
| Foreta kontroll |
Kommentarer:
1) I standarden ISO 7919-5 DP3 setter man følgende grenser:
| Akselkast (Smax) | < 1750 / √n | (1750-2500) / √n | (2500-3750) / √n | > 3750 / √n |
| Tilstand | Ingen handling | Ingen handling | Foreta kontroll | Øyeblikkelig stans |
Akselkast (Smax) [μm] n = turtall [o/min]
Eksempel:
Et aggregat med 500 o/min vil få følgende grenser:
| Akselkast (Smax) | < 78 μm | 78-112 μm | 112-168 μm | > 168 μm |
I standarden VDI 2059, Blatt 5, setter man en grense for hva som bør betraktes som akseptabelt akselkast (Smax) i vannkraftaggregater ut fra turtallet til maskinen. For et aggregat som går med 500 o/min er denne grensen satt til 95 μm.
2) Det målte akselkast divideres med lagerklaring og man finner den relative størrelsen på akselkastet.
Eksempel:
Radiell lagerklaring: 250 μm
Målt akselkast (Smax): 135 μm
Relativt akselkast: 135/250 = 0,54
Det vil si 54 %
3) Endring av akselkast finnes ved å dividere målt akselkast med akselkast ved normaltilstand.
Eksempel:
Målt akselkast: 135 μm
Normaltilstand: 105 μm
Endret akselkast: 135/105 = 1,30
Det vil si +30 %
5.2.2 Akselbevegelsens form
| Ved tydelige endringer i aksialbevegelsens form 1) | Foreta kontroll |
1) Formen på akselbevegelsen vil variere en del fra lager til lager og det vil derfor være vanskelig å tallfeste størrelsen på endringene. Utgangspunktet når man ser etter endringer er normaltilstanden til aggregatet som beskrevet foran i dette kapitlet.
Endringen i formen oppdages ved å se på trendkurvene for akselbevegelsen i henholdsvis X- og Y-retning. Det vil være til stor hjelp i analysen om man benytter et oscilloskop.
5.2.3 Akselens posisjon i lageret
| Størrelse av akselens posisjon relatert til lagerklaring 1) | < 60 % | 60 - 80 % | < 80 |
| Ingen handling | Foreta kontroll | Øyeblikkelig stans |
1) Endringen i akselposisjon kan også relateres til lagerklaringen.
Eksempel:
Gap X = -10,2 V normaltilstand
Gap X = -13,1 V siste målte verdi
Differanse i Gap-verdi: (-13,2) - (-12,1) = 1,1 V
Omregnet til avstand: 1,1 · 125 = 138 μm
(sensor har følsomhet på 8 mV/μm)
Lagerklaring: 300 μm
Endring i akselposisjon: 138/300 = 0,46
Det vil si 46 %
5.2.4 Akselkastets retning
| Størrelse av akselkastets retning (fasevinkel) 1) | < 20° | > 20° |
| Ingen handling | Foreta kontroll |
1) Enkelte vern har overvåkning av fasevinkelen (se definisjonen i Terminologi) slik at den kan leses av direkte på vernet. Hvis ikke må det benyttes et oscilloskop for å finne fasevinkelen til akselbevegelsen. Bruk av oscilloskop er nærmere beskrevet i Registrering av akselbevegelsens størrelse, form og posisjon.
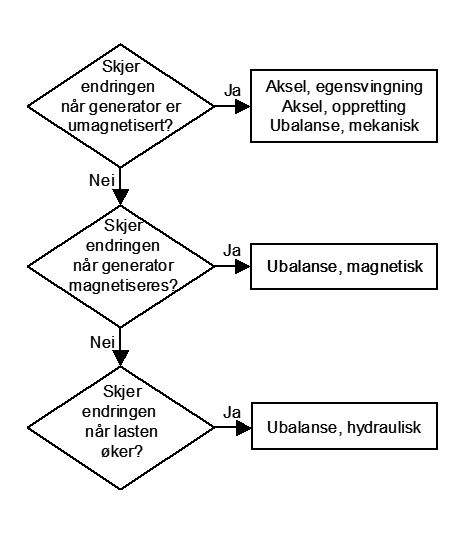
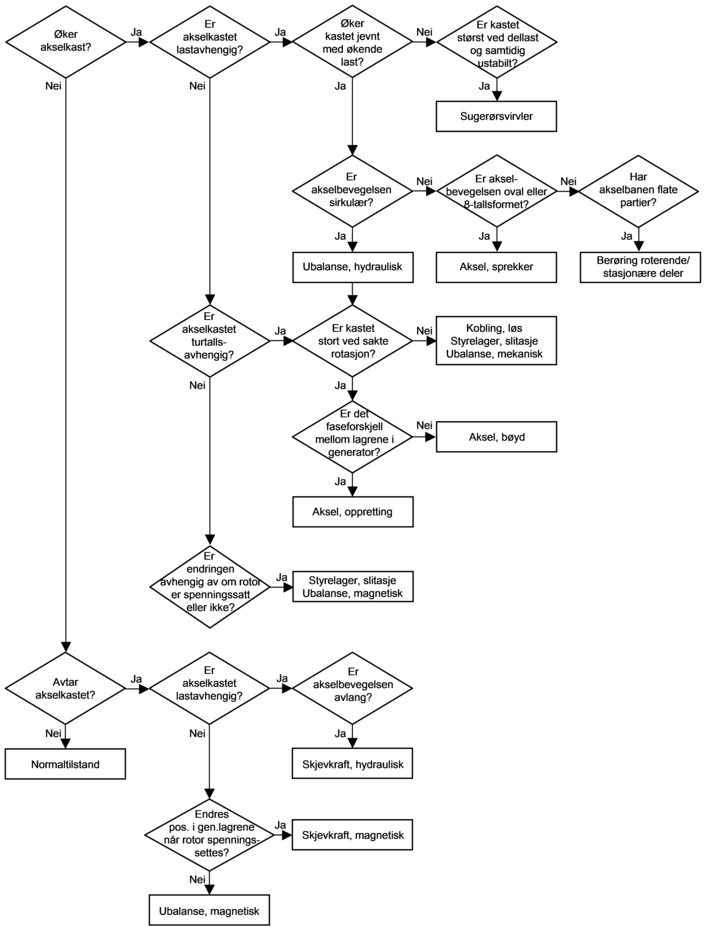
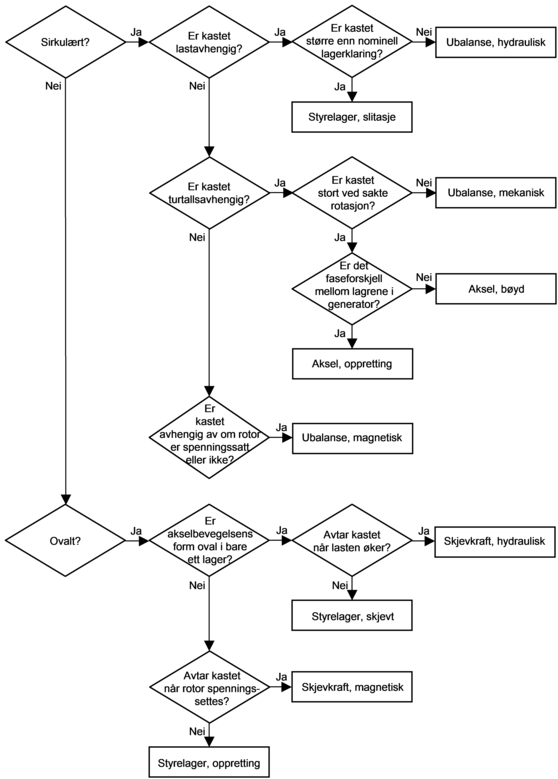
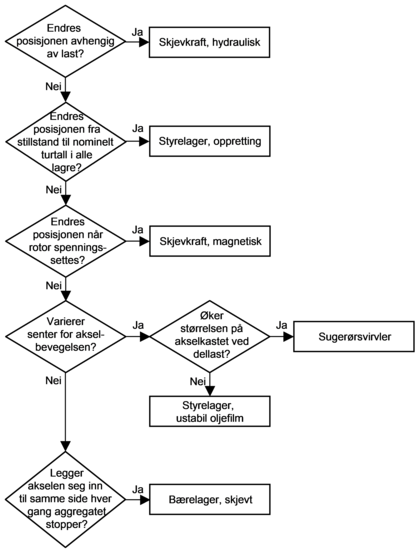
5.3 Feilsøking
Ut fra akselbevegelsens størrelse, form, posisjon og retning kan man ved hjelp av etterfølgende diagrammer diagnostisere feil/skader som er under utvikling i aggregatet.
Slik går man frem ved feilsøking:
Registrere endringer av akselbevegelsen.
Undersøke om endringer er avhengig av turtalls- eller lastendringer og om det skjer noe ved spenningssetting av rotor. Det er laget spesielle skjema for disse prøvene, se Registrering av akselbevegelsens størrelse, form og posisjon.
Ta frem det aktuelle feilsøkingsskjema (se neste side) alt etter hvilken endring av akselbevegelsen du har. Har det skjedd flere endringer, for eksempel både akselbevegelsens størrelse og form, gjør du en feilsøking først med den ene endringen så med en andre. Dette vil øke muligheten for å lokalisere feil/skader. Start øverst på diagrammene og gå nedover. Velg hvilken vei du skal gå ved å svare ja/nei på spørsmålene.
Når feil/skade er fastlagt, slå opp i Skadeatlas, og les videre om det aktuelle tilfellet.
Om du, etter å ha lest skadeatlaset, er i tvil om du har kommet frem til den rette feil/skade, se nøyere på de prøver du har tatt og gjør en ny feilsøking.
5.4 Innstilling av vibrasjonsvern
KAPITLET FLYTTES TIL NYTT KAP 2.7??
Før man setter alarmgrensene på et vibrasjonsvern bør man gå igjennom følgende program:
1) Undersøk hvordan Smax (eller X og Y, hvis det er det som overvåkes) varierer når turtallet varierer. Se skjema nr. ii 2) (eventuelt nr. v)
Undersøk hvordan Smax (eller X og Y, hvis det er det som overvåkes) varierer når lasten varierer. Se skjema nr. iii (eventuelt nr. vi)
Sett grensen for alarm, Lim 1, 20 til 30 μm over høyeste verdi oppnådd under pkt. 1 og 2.
Sett grensen for stopp, Lim 2, til 80 % av lagerklaringen.
Tidsforsinkelsen til Lim 1 settes normalt til 30 sekunder.
Tidsforsinkelsen til Lim 2 settes normalt til 3 sekunder.
1) Aggregater hvor vibrasjonsvernet går inn samtidig med feltbryter, det vil si ikke kobles inn før 90 % turtall og ut ved 100 % turtall, trenger ikke ta denne prøven.
2) Skjemaene det refereres til er vist i Registrering av akselbevegelsens størrelse, form og posisjon.
5.5 Lagerisolasjon
Dette kapittelet fantes ikke i original dokumentet under konverteringen - 07.07.2025.
5.6 Terminering av skjerm
Dette kapittelet fantes ikke i original dokumentet under konverteringen - 07.07.2025.
6 Skadeatlas
Skadeatlaset er samlet i et eget dokument Skadeatlas.
7 Terminologi
| Begrep | Beskrivelse |
|---|---|
| Akselerometer | Sensor for måling av vibrasjoner i stasjonære deler (måler akselerasjonen i svingeforløpet). Gir et signal proporsjonalt med vibrasjonens akselerasjon |
| Akselbevegelse | Den bevegelsen som akselsenter på et punkt av akselen beskriver når akselen roterer. |
| Akselkast | Se [Smax] |
| Amplitude | Se [Peak] |
| Analogt signal | "Virkelig" signal der spenning eller strøm representerer målestørrelsen. |
| Average | Gjennomsnitt (eng.) |
| Avstandsgiverkrets | Består av avstandsgiver, oscillator og eventuelt kabel mellom disse. |
| Balansering | Justering av massefordeling i en rotor for å få massesenter og rotasjonssenter til å sammenfalle. |
| Berøringsfri avstandsgiver | (eng.: Eddy-current probe) Induktiv analog giver som måler avstanden til et objekt uten å være i berøring med dette. Brukes her om sensorer basert på virvelstrømsprinsippet. Gir et signal proporsjonalt med avstanden. |
| Brusvibrasjon | Inneholder et svingeforløp uendelig mange frekvenser kalles dette brusvibrasjon, eller "hvit" støy. |
| Bærelagerfrekvens | Antall segmenter i bærelageret multiplisert med turtallsfrekvensen. |
| Båndbredde | Filterkarakteristikk. Er det måleområdet hvor målesignal er lineært med påvirkning fra sensor. |
| Digitalt signal | Signal er delt opp i punkter representert med tall. |
| Eddy-current probe | Se [Berøringsfri avstandsgiver] |
| Effektivverdi | Se [RMS] |
| Egenfrekvens | Svingefrekvensen til et system sammensatt av masser og fjærer. |
| Egenfrekvenser i akselstreng | |
| - Bøyekritisk egenfrekvens: Er når akselen bøyes ut. En tilstand som kan være kritisk. - Lagerkritisk egenfrekvens: Har man når akselen ikke bøyes ut, men i stedet svinger i oljefilmen i lageret. | |
| Eksitere | Stimulere. |
| Eksitasjonskilde | En systemfrekvens eller en kombinasjon av flere som ligger nær en egenfrekvens. |
| Fasereferanse | Se [Referansegiver] |
| Fasevinkel | 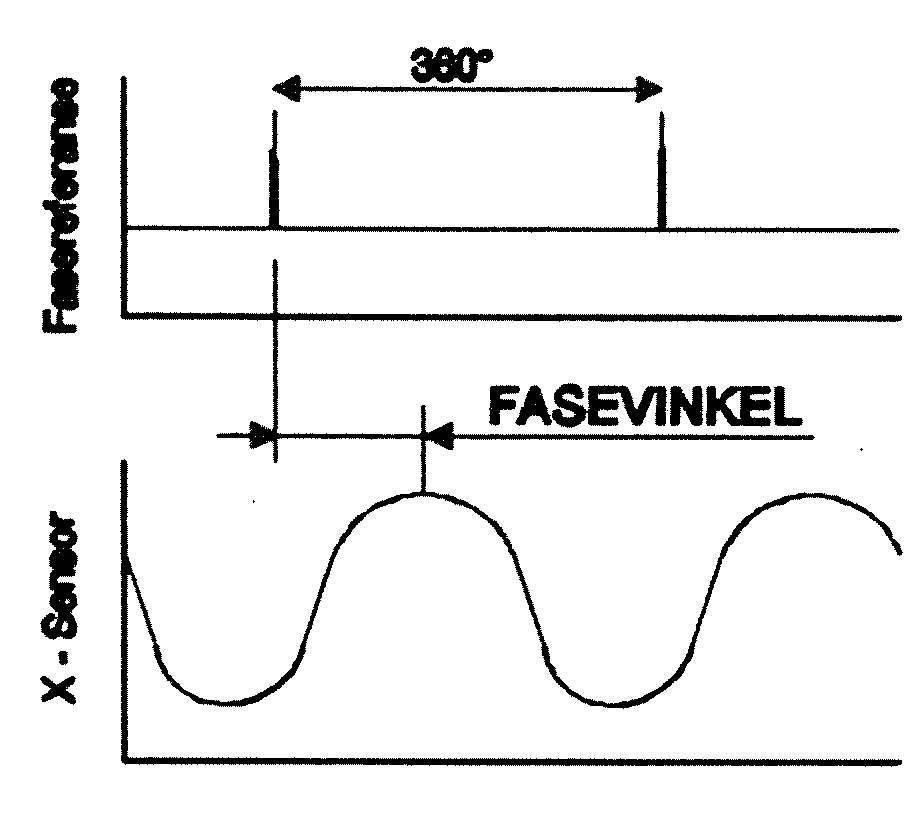 |
| Fingeravtrykk | Se [Referansemåling] |
| FFT (Fast Fourier Transform) | En metode for å foreta Fourier Transform som er rask og derfor benyttes mye i vibrasjonsmåleinstrumenter. |
| Formfeil (eng.: run-out) | Angir måleflatens avvik fra en konsentrisk sirkel om akselsenter. Formfeil kan være mekanisk som overflateriper, urundhet eller eksentrisitet, men det gjelder også ujevne magnetiske egenskaper i materialet. |
| Fourier Transform | Et tilfeldig tidssignal kan teoretisk representeres som en uendelig sum av sinussvingninger med varierende amplitude. Beregningsmetoder for å dele opp et tidssignal i sinussvingninger kalles Fourier Transform. |
| Frekvens | Se under [Vibrasjon] |
| Frekvensspekter | Et diagram som viser nivåene på enkelt frekvenser fra en måling, oftest beregnet via FFT. På den ene aksen har man frekvens [Hz] og på den andre har man nivået på frekvensen uttrykt som forskyvning [μm], hastighet [mm/s] eller akselerasjon [mm/s²] |
| Gap X, Y | 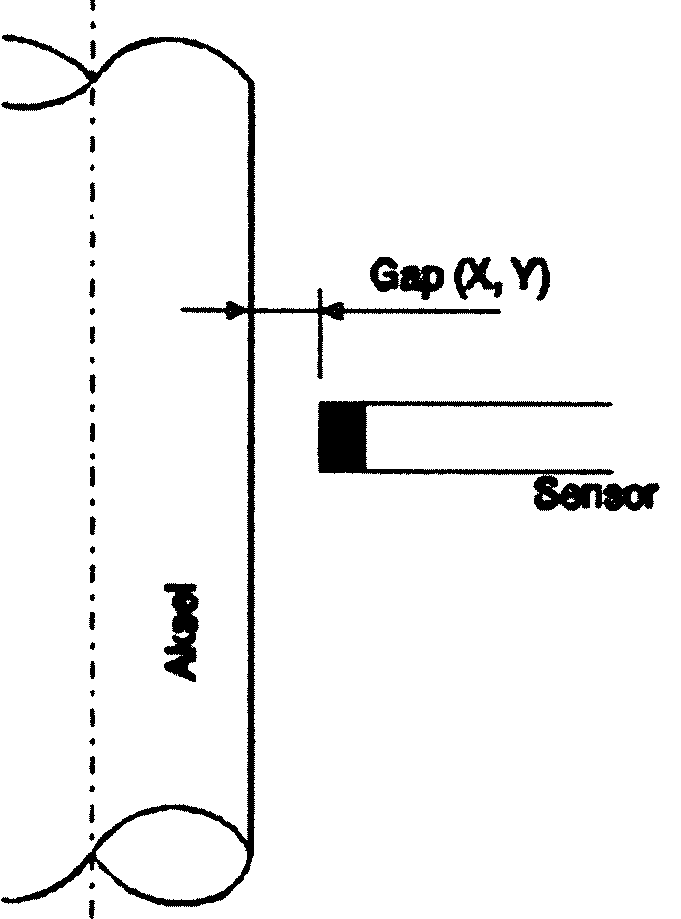 |
| Harmoniske overtoner | Se [Multippel] |
| Harmoniske svingninger | Se [Sinussvingninger] |
| Hastighetsgiver | Sensor for måling av vibrasjoner i stasjonære deler (måler hastigheten i svingeforløpet). Gir et signal proporsjonalt med vibrasjons hastighet. |
| Hertz, Hz | Benevnelse for frekvens, Hz = 1/sek |
| Hvit støy | Se [Brusvibrasjoner] |
| Kaskadeplott | Er plott hvor man viser flere frekvensspektere i perspektiv. Frekvensspekterene tas med varierende turtall eller tilstand på maskinen. Kaskadeplott benyttes for å registrere egenfrekvensene til en komponent. |
| Key-phasor | Se [Referansegiver] |
| Kritisk turtall | Se [Egenfrekvenser i akselstreng] |
| Ledeskovelfrekvens | Betegnes også som ledeskovelpasseringsfrekvens. Definert som antall ledeskovler multiplisert med turtallsfrekvensen. |
| Lim 1, 2, .. | Betegnelse som benyttes i forbindelse med vibrasjonsvern på satte grenseverdier for akselbevegelsen. |
| Lineært område | Måleområdet til avstandsgiverkrets der signal er proporsjonalt med avstand til måleflaten innen en gitt toleranse. |
| Løpeskovelfrekvens | Betegnes også som løpeskovelpasseringsfrekvens. Definert som antall løpeskovler multiplisert med turtallsfrekvensen. |
| Max X, Y | Største radielle akselbevegelse i X-, henholdsvis Y-retning. Se forøvrig [Smax] |
| Mobilitet | Motsatt av stivhet. |
| Multippel Mangfoldig | I forbindelse med vibrasjonsanalyse menes frekvenser som er 2,3,4,5,…. ganger en systemfrekvens. |
| Måleflate | Angir hele den rotasjonsflaten avstandsgiveren måler mot og som påvirker giveren. |
| Orbit | Den sammensatte akselbevegelse av tidssignaler fra to avstandsgivere. |
| Oscillator | Setter opp et høyfrekvent signal i avstandsgiver slik at det blir indusert et elektromagnetisk felt mellom avstandsgiver og måleflate. Feltet påvirkes av avstand til måleflate og omformes til et signal proporsjonalt med avstand. Oscillator kan være eksternt plassert eller innebygd i giver. |
| Overkritisk turtall | Når turtallsfrekvensen er høyere enn bøyekritisk eller lagerkritisk egenfrekvens. |
| Parametrisk resonans | En kombinasjon av to egenfrekvenser
etter følgende formel: f = (f_1 ± f_2)/a f_1 og f_2 = Egenfrekvenser (Hz) a = Et vilkårlig heltall (1,2,3,4,…) Parametrisk resonans er spesielt registrert på aggregater med to styrelagre. |
| Peak | Spiss, toppunkt (eng.). Peak to peak: Avstanden mellom høyeste og laveste verdi i et svingeforløp. 0 to peak: Avstanden fra nullnivå til høyeste eller laveste verdi i et svingeforløp. |
| Periode | Se under [Vibrasjon] |
| Polpasseringsfrekvens | Antall poler i rotor multiplisert med turtallsfrekvensen. Dette er 2 ganger linjefrekvensen og vil være 100 Hz for vannkraftaggregater i Norge. |
| Random | Tilfeldig, uregelmessig (eng.) |
| Referansegiver | En referansegiver (fasereferanse) skal gi signal når et fast punkt på rotor passerer. Dette er viktig i analyse for å kunne fastlegge hvor på rotor feil og ubalanse opptrer. |
| Referansemåling | En vibrasjonsmåling som tas når tilstanden til et aggregat er god og som benyttes til referanse ved senere tilstandskontroller og analyser. |
| Resonans | Eksitasjon av egensvingning. Se [Egenfrekvens] og [Eksitasjonskilde]. |
| RMS (Root Mean Square) | Tidsintegral av en svingning, også kalt effektivverdi. |
| Rotasjonsfrekvens | Se [Turtallsfrekvens] |
| Run-out | Se [Formfeil] |
| Run-out compensator | Ved overvåkning og analyse av akselbevegelse kan formfeil registreres med et eget instrument og trekkes fra målesignalet slik at man måler akselbevegelsen alene. |
| Sidebånd | Ved enkelte skadetilfeller vil man i et frekvensspekter få frem såkalte sidebånd til en systemfrekvens. På hver side av systemfrekvensen kommer det opp nye frekvenstopper som ligger 1x turtallsfrekvensen i fra systemfrekvensen. |
| Sinussvingning | Et periodisk svingningsforløp kan være sammensatt av en rekke frekvenser, f_0, f_1, f_2, … med hver sin periode T. En sinussvingning eller såkalt harmonisk svingning inneholder bare en frekvenskomponent, f_0 |
| Smax | 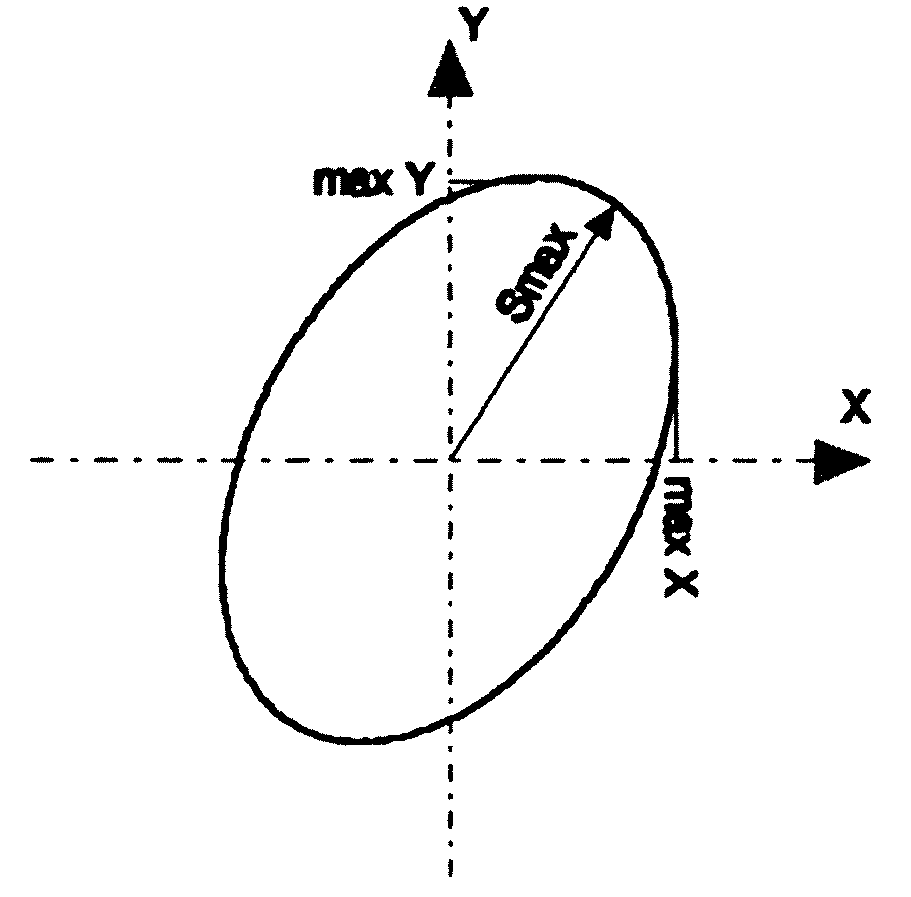 |
| Slow-roll | Registrering ved sakte rotasjon. Brukes for å kontrollere akselretthet og registrere formfeil. |
| Svevning | Når to systemfrekvenser ligger svært nær hverandre vil de vekselvis dempe og forsterke hverandre. Svevningens frekvens er lik differansen mellom de to frekvenser. |
| Systemfrekvens | De frekvenser som er en direkte følge av aggregatets rotasjon, det vil si turtallet og rene multipler av dette. |
| Tachometer | Turtallsteller |
| Tidsbilde | Forløp av et tidssignal som viser sammenhengen mellom svingningen i en komponent og tiden. |
| Tidssignal | Signal fra en sensor. |
| Transient | En plutselig, kortvarig forandring i vibrasjonsforløpet. |
| Trigger | Utløser. |
| Turtallsfrekvens | Antall omdreininger pr. sekund. Beregnes ved at man dividerer turtallet(o/min) for aggregatet med 60(sek). |
| Underkritisk turtall | Når turtallsfrekvensen er lavere enn bøyekritisk eller lagerkritisk egenfrekvens. Dette er konstruksjonsforutsetning for de fleste maskiner. |
| Ubalanse | Avvik mellom massesenter og rotasjonssenter. |
| Vibrasjon | Vibrasjon eller svingning er et legeme som beveger seg frem og tilbake omkring et likevektspunkt. Tiden, T mellom hver gang vibrasjonen passerer likevektsstilling kalles periode, og den inverse 1/T = f er systemets frekvens. |
| Water-fall plot | Se [Kaskadeplott] |
8 Skjema, full størrelse
Dette kapittelet fantes ikke i original dokumentet under konverteringen 07.07.2025.
Beskrevet i Kapittel 4.
9 Litteraturreferanser
Følgende nasjonale og internasjonale standarder gir nyttig informasjon for måling av akselkast.
| [1] | ISO 7919/1 Internasjonal standard for måling og vurdering av akselbevegelse i roterende maskiner |
| [2] | ISO 7919-5 DP3 |
| [3] | ISO 7919-5 DP5 Internasjonal standard for måling av akselbevegelse i hydrauliske maskiner, med akseptkriterier. Forslag til standard. |
| [4] | VDI 2059/1 Tysk standard for måling av akselbevegelse i turbomaskiner |
| [5] | VDI 2059/5 Tysk standard for måling av akselbevegelse i vannkraftaggregat, med akseptkriterier |
| [6] | API 670 Amerikansk standard for overvåkingsutstyr til roterende maskiner |
10 Vedlegg
10.1 Flytdiagrammer med tolkningskriterier
Et generelt flytdiagram for vedlikeholdsprosessen er gitt i Flytdiagrammer med tolkningskriterier i dokumentet Innledning.
10.1.1 V1.1 Akselbevegelsens størrelse
10.1.2 V1.2 Akselbevegelsens form
10.1.3 V1.3 Akselbevegelsens posisjon
10.1.4 V1.4 Akselkastets retning